
동영상
일반적인 설명
TP-TGXG-200 자동 병뚜껑 기계는 병뚜껑을 자동으로 닫는 데 사용됩니다. 식품, 제약, 화학 산업 등 다양한 분야에 널리 사용됩니다. 일반 병과 나사 뚜껑의 모양, 재질, 크기에 제한이 없습니다. 연속 캡핑 방식으로 다양한 포장 라인 속도에 대응할 수 있습니다. 이 기계는 다양한 용도로 사용 가능하며, 조작이 간편합니다. 기존의 간헐 작동 방식과 비교하여 TP-TGXG-200은 효율이 높고, 더욱 단단하게 압착되며, 뚜껑 손상이 적습니다.
애플리케이션
자동 캡핑 기계는 다양한 크기, 모양, 재질의 나사 캡이 달린 병에 사용할 수 있습니다.
A. 병 크기
직경 20~120mm, 높이 60~180mm의 병에 적합합니다. 이 범위를 넘는 병 크기에도 맞춤 제작이 가능합니다.

나. 병 모양
자동 캡핑 기계는 원형, 사각형 또는 복잡한 모양 등 다양한 모양에 적용될 수 있습니다.




C. 병 및 캡 재질
유리, 플라스틱, 금속 등 무엇이든 자동 캡핑 기계는 모두 처리할 수 있습니다.


D. 스크류 캡 타입
자동 캡핑 기계는 펌프, 스프레이, 드롭 캡 등 모든 종류의 나사형 캡을 조일 수 있습니다.



E. 산업
자동 캡핑기는 분말, 액상, 과립 포장 라인부터 식품, 의약품, 화학 등 모든 산업 분야에 적용 가능합니다. 스크류 캡이 있는 곳이라면 어디든 자동 캡핑기를 사용할 수 있습니다.
건설 및 작업 과정
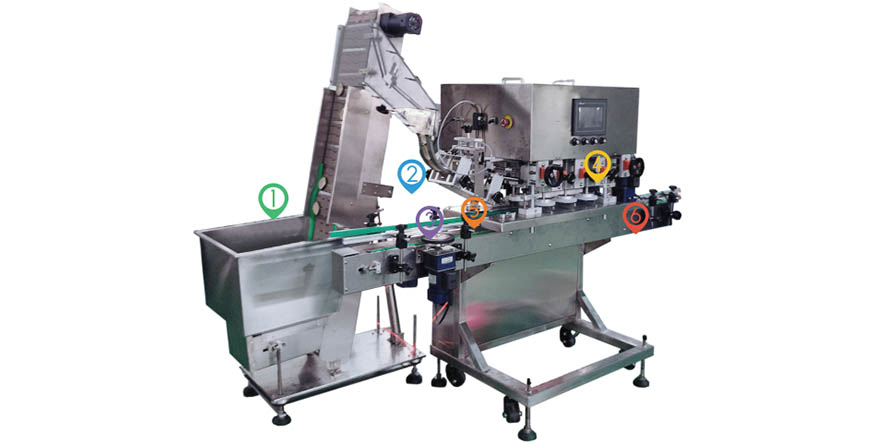
캡핑 머신과 캡 피더로 구성되어 있습니다.
1. 캡 피더
2. 캡 배치
3. 병 분리기
4. 휠 캡핑
5. 병 고정 벨트
6. 병 운반 벨트
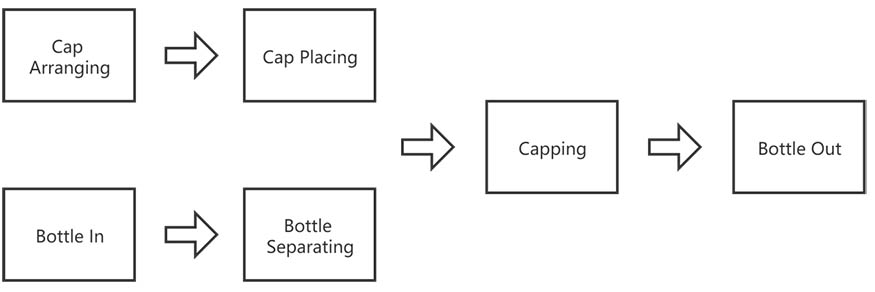
다음은 작업 과정입니다
특징
■ 다양한 모양과 재질의 병, 뚜껑에 널리 사용됩니다.
■ PLC&터치스크린 제어로 조작이 간편합니다.
■ 간편한 조작과 조정으로 인력과 시간 비용을 대폭 절감할 수 있습니다.
■ 모든 종류의 포장 라인에 적합한 높고 조절 가능한 속도.
■ 안정적인 성능과 높은 정확도.
■ 원버튼 시동 기능으로 편의성이 더욱 높아졌습니다.
■ 세부적인 디자인으로 기계를 더욱 인간적이고 지능적으로 만들었습니다.
■ 기계의 외관이 양호하고, 디자인과 외관이 고급스럽습니다.
■ 기계 본체는 SUS 304로 제작되어 GMP 기준을 충족합니다.
■ 병과 뚜껑이 닿는 모든 부분은 식품에 안전한 소재로 제작되었습니다.
■ 다양한 병의 크기를 보여주는 디지털 디스플레이 화면으로 병을 교체할 때 편리합니다(옵션).
■ 실수로 캡이 닫힌 병을 제거하는 광센서(옵션).
■ 뚜껑을 자동으로 넣을 수 있는 계단형 리프팅 장치.
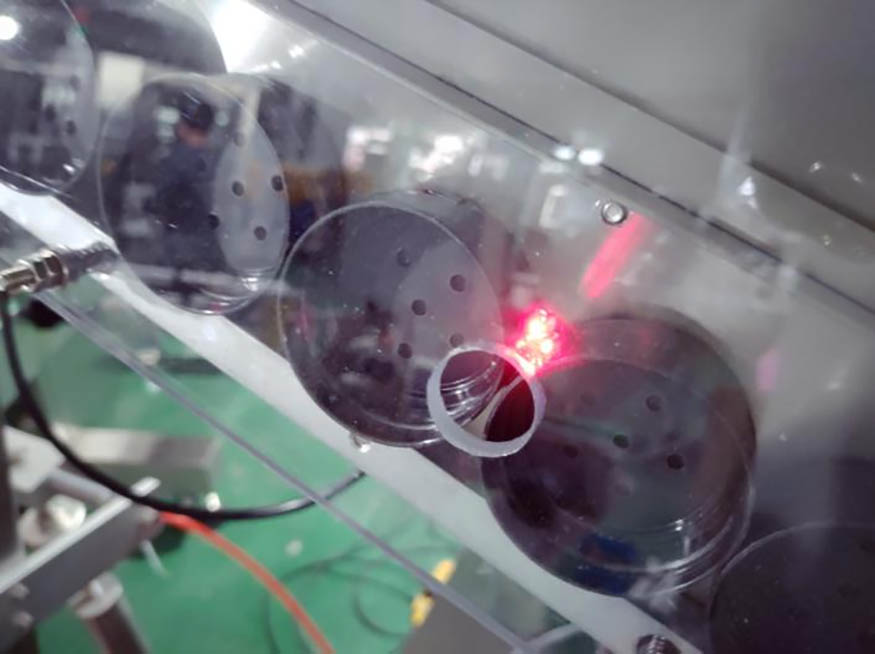
■ 뚜껑 떨어지는 부분은 오류 뚜껑을 제거할 수 있습니다(공기 분사 및 무게 측정).
■ 뚜껑을 누르는 벨트가 기울어져 있어 뚜껑을 올바른 위치에 맞춰 누른 후 누를 수 있습니다.
지능적인
캡 양쪽의 중심이 다른 원리를 사용하여 올바른 방향으로만 캡을 위로 올릴 수 있습니다. 잘못된 방향으로 캡을 올리면 자동으로 떨어집니다.
컨베이어가 캡을 위로 가져온 후, 송풍기가 캡을 캡 트랙으로 불어 넣습니다.

오류 뚜껑 센서는 뒤집힌 뚜껑을 쉽게 감지합니다. 자동 오류 뚜껑 제거 기능과 병 센서를 통해 완벽한 캡핑 효과를 제공합니다.
병 분리기는 해당 위치에서 병의 이동 속도를 조절하여 병을 서로 분리합니다. 일반적으로 둥근 병에는 분리기 하나가 필요하고, 사각형 병에는 마주 보는 분리기 두 개가 필요합니다.


캡 부족 감지 장치는 캡 공급기의 작동 및 정지를 자동으로 제어합니다. 캡 트랙 양쪽에 두 개의 센서가 있는데, 하나는 트랙에 캡이 채워져 있는지 확인하고, 다른 하나는 트랙에 캡이 비어 있는지 확인합니다.
효율적인
병 컨베이어와 캡 공급기의 최대 속도는 100bpm에 달할 수 있어 다양한 포장 라인에 적합한 고속 기계를 구현할 수 있습니다.
세 쌍의 바퀴가 캡을 빠르게 돌려서 엽니다. 각 쌍은 고유한 기능을 가지고 있습니다. 첫 번째 쌍은 캡을 제자리에 놓기 어렵게 하기 위해 역회전할 수 있습니다. 하지만 캡이 정상일 때는 두 번째 쌍의 바퀴와 함께 캡을 빠르게 돌려서 적절한 위치에 놓을 수 있습니다. 세 번째 쌍은 캡을 조이기 위해 약간씩 조정되므로 모든 바퀴 중 속도가 가장 느립니다.

편리한
다른 공급업체의 핸드 휠 조정 방식과 비교했을 때, 캡핑 장치 전체를 올리거나 내리는 버튼 하나만으로 훨씬 편리합니다.
좌우로 네 개의 스위치를 사용하여 병 컨베이어 속도, 병 클램프 속도, 캡 상승 속도, 병 분리 속도를 조절할 수 있습니다. 다이얼을 통해 작업자는 각 포장 종류에 맞는 적절한 속도에 쉽게 도달할 수 있습니다.


두 개의 병 고정 벨트 사이의 거리를 쉽게 조절할 수 있는 핸드 휠이 있습니다. 고정 벨트 양쪽 끝에 두 개의 휠이 있습니다. 다이얼을 사용하면 병 크기를 변경할 때 정확한 위치로 이동할 수 있습니다.
캡핑 휠과 캡 사이의 거리를 조절하는 스위치입니다. 거리가 가까울수록 캡이 더 단단해집니다. 다이얼을 사용하면 사용자가 가장 적합한 거리를 편리하게 찾을 수 있습니다.

간편한 조작
간단한 조작 프로그램을 갖춘 PLC 및 터치스크린 제어로 작업이 더 쉽고 효율적입니다.


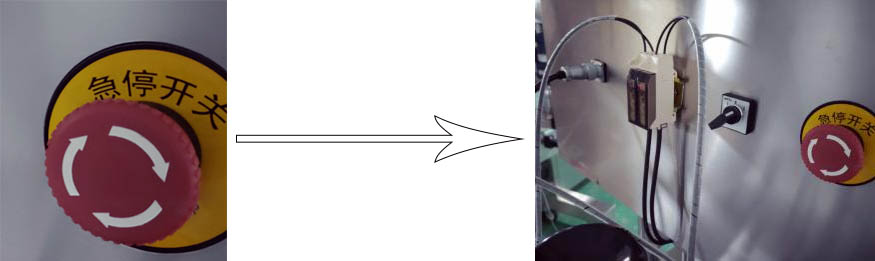
긴급 상황에서 기계를 즉시 멈추게 하는 비상 버튼으로 작업자의 안전을 보장합니다.
| TP-TGXG-200 병 캡핑기 | |||
| 용량 | 50-120병/분 | 차원 | 2100*900*1800mm |
| 병 직경 | Φ22-120mm (요구 사항에 따라 맞춤 제작) | 병 높이 | 60-280mm (요구 사항에 따라 맞춤 제작) |
| 뚜껑 크기 | Φ15-120mm | 순중량 | 350kg |
| 적격 요율 | ≥99% | 힘 | 1300W |
| 재료 | 스테인리스 스틸 304 | 전압 | 220V/50-60Hz(또는 맞춤형) |
| 아니요. | 이름 | 기원 | 상표 |
| 1 | 인버터 | 대만 | 델타 |
| 2 | 터치스크린 | 중국 | 터치윈 |
| 3 | 광센서 | 한국 | 오토닉스 |
| 4 | CPU | US | 아트멜 |
| 5 | 인터페이스 칩 | US | 멕시코 |
| 6 | 프레싱 벨트 | 상하이 |
|
| 7 | 시리즈 모터 | 대만 | 탈라이크/GPG |
| 8 | SS 304 프레임 | 상하이 | 바오스틸 |
자동 캡핑 기계는 충전기 및 라벨링 기계와 함께 작동하여 포장 라인을 형성할 수 있습니다.
A. 병 분리기+오거 필러+자동 캡핑기+포일 밀봉기.
B. 병 언스크램블러+오거 필러+자동 캡핑기+포일 밀봉기+라벨링기


박스 내 액세서리
■ 사용설명서
■ 전기배선도 및 결선도
■ 안전운전 안내
■ 착용파츠 세트
■ 유지보수 도구
■ 구성 목록(원산지, 모델, 사양, 가격)



1. 캡 엘리베이터 및 캡 장착 시스템 설치.
(1)캡 배열 및 감지 센서 설치
캡 엘리베이터와 배치 시스템은 배송 전에 분리되어 있습니다. 캡핑 기계를 작동하기 전에 캡 정렬 및 배치 시스템을 캡핑 기계에 설치하십시오. 다음 그림과 같이 시스템을 연결하십시오.
캡 검사 센서가 없습니다(기계 정지)
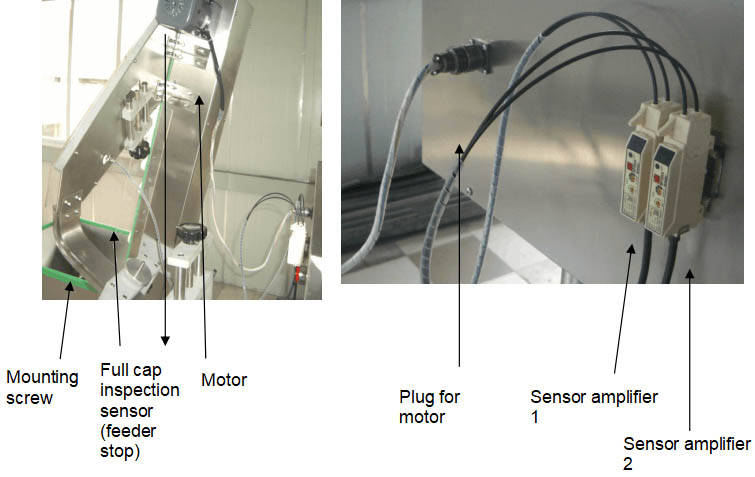
a. 캡 장착 트랙과 램프를 장착 나사로 연결합니다.
b. 제어판 오른쪽에 있는 플러그에 모터선을 연결하세요.
c. 풀캡 검사 센서를 센서 증폭기 1에 연결합니다.
d. 캡 부족 검사 센서를 센서 증폭기 2에 연결합니다.
캡 클라이밍 체인 각도 조정: 캡 클라이밍 체인 각도는 배송 전 고객님께서 제공해 주신 샘플 캡에 따라 조정되었습니다. 캡 사양을 변경해야 하는 경우(크기만 변경하고 캡 종류는 변경하지 않음), 각도 조정 나사를 사용하여 체인이 위쪽으로 기울어진 캡만 위로 올릴 수 있도록 캡 클라이밍 체인 각도를 조정하십시오. 다음과 같이 표시됩니다.

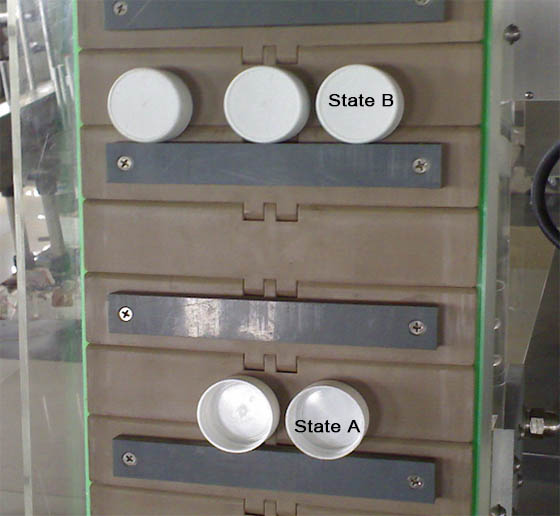
캡이 올라가는 체인이 캡을 위로 올릴 때 상태 A의 캡은 올바른 방향입니다.
체인이 적절한 각도에 있으면 상태 B의 캡은 자동으로 탱크 안으로 떨어집니다.
(2) 캡 드롭 시스템(슈트) 조정
낙하 슈트의 각도와 공간은 제공된 샘플에 따라 이미 설정되어 있습니다. 일반적으로 병이나 뚜껑에 대한 새로운 사양이 없다면 설정을 조정할 필요가 없습니다. 또한, 병이나 뚜껑에 대한 사양이 하나 이상인 경우, 고객은 계약서 또는 첨부 문서에 해당 품목을 명시하여 제조사가 추가 수정을 위한 충분한 공간을 확보하도록 해야 합니다. 조정 방법은 다음과 같습니다.
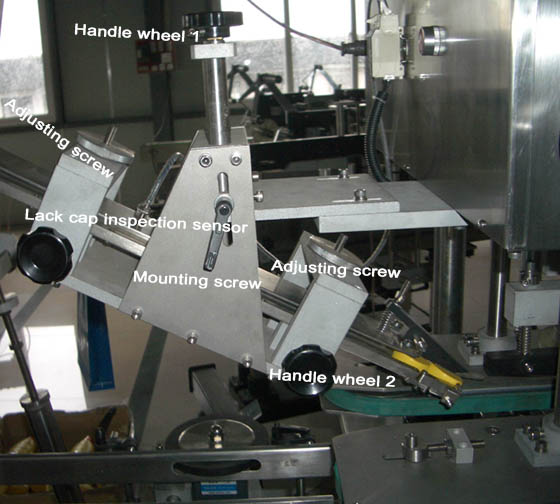
캡 떨어뜨리기 시스템의 높이를 조정하세요: 핸들 휠을 돌리기 전에 장착 나사를 풀어주세요. 1.
조정나사로 슈트 공간의 높이를 조절할 수 있습니다.
핸들 휠 2(양쪽 면)로 슈트 공간의 너비를 조절할 수 있습니다.
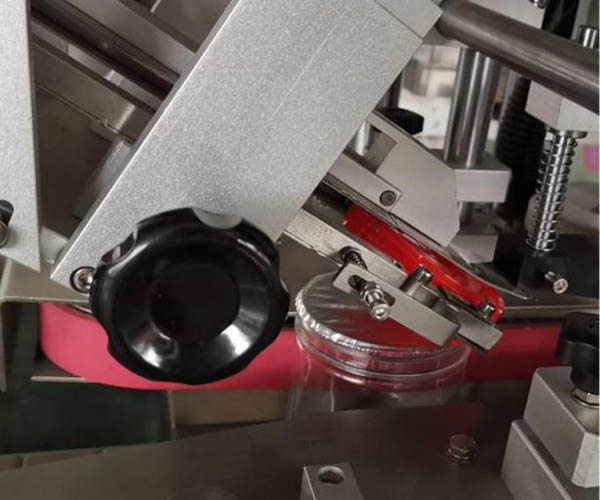
(3) 캡 누름부 조절
병이 캡 누름 부분 영역으로 공급되면 캡이 슈트에서 병 입구를 자동으로 덮습니다. 캡 누름 부분은 병과 캡의 높이에 따라 조절될 수 있습니다. 캡에 가해지는 압력이 적절하지 않으면 캡핑 성능에 영향을 미칩니다. 캡 누름 부분의 위치가 너무 높으면 누름 성능에 영향을 미치고, 너무 낮으면 캡이나 병이 손상됩니다. 일반적으로 캡 누름 부분의 높이는 배송 전에 조정됩니다. 사용자가 높이를 조정해야 하는 경우, 조정 방법은 다음과 같습니다.

캡 누름 부분의 높이를 조정하기 전에 장착 나사를 풀어주세요.
가장 작은 병에 맞게 기계에 캡을 누르는 부분이 하나 더 있는데, 변경 방법은 영상에 나와 있습니다.
(4) 캡을 슈트에 불어넣기 위해 공기압을 조절합니다.

2. 주요 부품의 높이를 전체적으로 조정합니다.
병 고정 구조, 고무 탄성 회전 휠, 뚜껑 누름 부분 등 주요 부품의 높이는 기계 엘리베이터를 통해 전체적으로 조절할 수 있습니다. 기계 엘리베이터의 제어 버튼은 제어판 오른쪽에 있습니다. 사용자는 기계 엘리베이터를 작동하기 전에 두 개의 지지 기둥에 있는 고정 나사를 풀어야 합니다.
ø는 아래를, ø는 위를 의미합니다. 스핀 휠의 위치가 캡과 일치하는지 확인하세요. 조정 후에는 엘리베이터 전원을 끄고 장착 나사를 조여주세요.
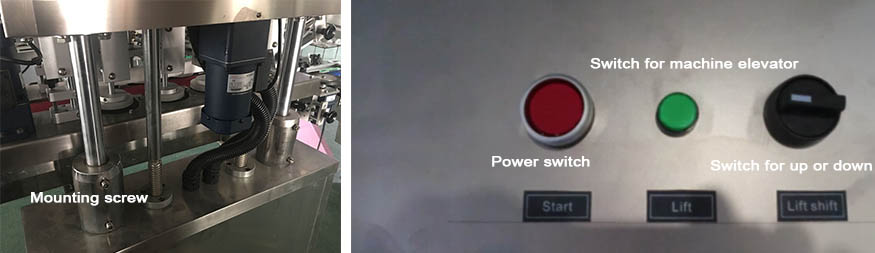
참고: 원하는 위치에 도착할 때까지 엘리베이터 스위치(녹색)를 계속 눌러주세요. 엘리베이터 속도가 매우 느리니, 천천히 기다려 주세요.
3. 고무탄성 스핀 휠(스핀 휠 3쌍)을 조정합니다.
스핀 휠의 높이는 기계 엘리베이터로 조절됩니다.
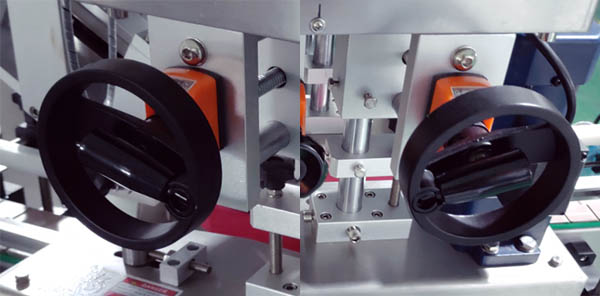
스핀 휠 쌍의 너비는 캡의 직경에 따라 조정됩니다.
일반적으로 두 바퀴 사이의 간격은 캡 직경보다 2~3mm 짧습니다. 작업자는 핸들 휠 B를 사용하여 스핀 휠의 너비를 조정할 수 있습니다. (각 핸들 휠은 상대 스핀 휠을 조정할 수 있습니다.)
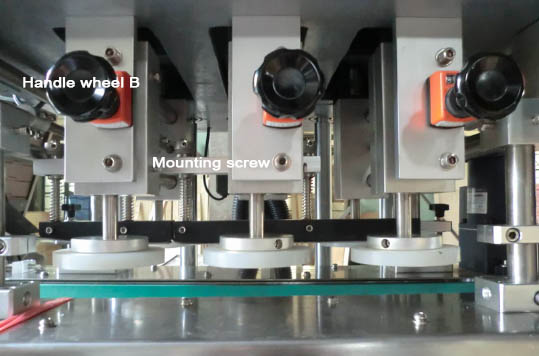
핸들 휠 B를 조정하기 전에 장착 나사를 풀어주세요.
4. 병 고정 구조 조정.
병의 고정 위치는 고정 구조와 연결 축의 위치를 조정하여 조절할 수 있습니다. 고정 위치가 병에서 너무 낮으면 공급 또는 캡핑 시 병이 쉽게 눕게 됩니다. 반대로 고정 위치가 병에서 너무 높으면 스핀 휠의 정상적인 작동을 방해합니다. 조정 후 컨베이어 중심선과 병 고정 구조의 중심선이 일직선상에 있는지 확인하십시오.

핸들 휠 A를 돌려(두 손을 함께 돌려서 핸들을 돌릴 수 있도록) 병 고정 벨트 사이의 거리를 조절합니다. 이렇게 하면 압착 과정에서 병을 잘 고정할 수 있습니다.
병 고정 벨트의 높이는 일반적으로 기계 엘리베이터로 조절됩니다.
(주의: 작업자는 4링크 샤프트의 장착 나사를 풀고 나서 현미경으로 병 고정 벨트의 높이를 조정할 수 있습니다.)
작업자가 큰 범위 내에서 고정 벨트를 이동해야 하는 경우 나사 1과 나사 2를 함께 푼 후 벨트의 위치를 조정하세요. 작업자가 작은 범위 내에서 벨트의 높이를 조정해야 하는 경우 나사 1만 풀고 조정 손잡이를 돌리세요.

5. 병 공간 조정 바퀴와 난간 조정.
병 규격을 교체할 때 작업자는 병 간격 조정 휠과 레일의 위치를 변경해야 합니다. 간격 조정 휠과 레일 사이의 간격은 병 직경보다 2~3mm 작아야 합니다. 조정 후 컨베이어 중심선과 병 고정 구조물의 중심선이 일직선상에 있는지 확인하십시오.
조절 나사를 풀면 병 공간 조절 휠의 위치를 조절할 수 있습니다.
느슨한 조절 핸들로 컨베이어 양쪽의 난간 너비를 조절할 수 있습니다.


